![]()
Le paramoteur
Nouveau : une video (5,6 Mo) en vol de la version 1.5 du paramoteur (voir détails au bas de la page)

|
Depuis longtemps l'envie de faire voler un paramoteur me titillait, cepandant chaque fois que j'y pensais, l'idée de coudre de la toile de spi me rebutait. Cependant avec le développement des cerf volants de traction, le prix de ces voiles ŕ bien baissé, devenant accessible pour une utilisation RC.
Je suis donc parti d'une voile décathlon 2,3m2, ŕ environ 100€. Aprčs avoir fait quelques vols en mode cerf volant de traction (bien pour la muscu mais d'un interret assez limité en vol quand męme), j'ai opéré quelques modifs (réversibles trčs simplement) pour la transformer en paramoteur RC. Le controlé se fait uniquement pour touner (rouli, lacet?) par un transfert de masse et pour monter / descendre (tangage?) simplement en utilisant un variateur sur le moteur. Donc pour tourner, les servos font pivoter la bare de contrôle sur laquelle et fixée le voile, transférant ainsi le poids de la nacelle sur l'une des deux suspentes.
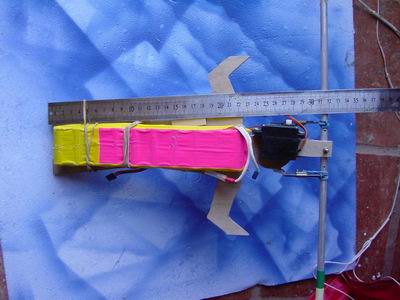
La nacelle Trčs simplifiée, juste pour valider les essais, donc pas trčs réaliste, mais de loin ça fait illusion.
Elle est réalisée entičrement en CTP 5mm aviation, reprenant vaguement la silhouette d'un pilote.Elle acceuille le moteur , 2 servos standars en parallčle pour plus de couple, l'accu de propulsion et le variateur.
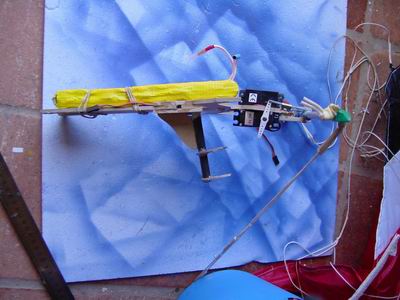
Le moteur est fixé sur un bati un anticouple trčs
important (au moins 10°), pour eviter que l'ensemble ne se mette
ŕ plat en vol sur un coup d'électrons. Le paramoteur est propulsé
par un brushless Mega 22/30/4 variateur jeti 3P 40 amp, hélice repliable
en prise directe, L'accu se compose de 8 ŕ 10 éléments 3000mA Nimh, icil moteur n'est pas en place. Les servos sont des standards, mis en paralléle (2 servos) pour augmenter le couple. Cependant ils pourraient ętre avantageusement remplacés par un gros servo de 10 kg. Un couple important est nécassaire car le bras de levier est important et les aterrissages parfois un peu brutaux, car sans arrondis possible la plupart du temps...
La voile Il s'agit donc d'une PW 2,3 de Décathlon. L'incidence ŕ été diminuée en racourcissant les suspentes avant (noeud) . En effet sans cette modification, l'aile traine trop et le paramoteur décroche, suspendu au moteur. La marge de réglage est cependant trčs faible car si les avant sont trop courts, les arričres ne portent plus, flottant au vent, entrainant des occilations de la voile par intemitence. Elle est fixée sur la bare de controle de la nacelle par ses deux suspentes terminales, normalement utilisées par les lignes de cerf volant
. Le Vol
Le vol doit impérativement se dérouler en l'absance de vent, du fait de la vitesse de vol et de la maniabilité limitée de l'engin mais aussi ŕ cause de la souplesse de la voile, relativement sensible au vent. En effet, dans certaines configurations de vol, selon les turbulences, la voile peut "fermer" comme un vrai paramoteur.
Le lancé se fait simplement face au vent, moteur en marche sans se faire happer par l'hélice qui ne passe pas loin (donc moteur pas ŕ fond pour plus de sécurité) Le vol est particuličrement réaliste,et facile, du fait du volume de l'ensemble en vol et de la faible vitesse.. Cependant la maniabilité est assez limitée : le rayon de virage d'une vingtaine de mčtres environ ne permet pas les manoeuvre d'évitement d'urgence... Donc attention aux arbres qui se font un plaisir de s'enmeler aux suspentes, heureusement la voile est solide, on peut tirer dessus! En vol lorsque l'air est un peu turbulent , il faut contrer le balancement en roulis de la voile, mais cela reste trčs controlable et donne un peu plus d'interet au pilotage. De męme les coups de gaz doivent ętre bien dosés pour atténuer le balancement. La maniabilité est améliorée en chargeant plus la nacelle avec un gros accu, placé le plus bas possible, mais il faut augmenter la puissance des servos en conséquence...Des essais pour utiliser des freins comme sur les parapentes grandeur ont rapidement été abandonnés car trčs compliqués... L'autonomie atteint 15 minutes, puis le bec coupe. Pour l'attero, mieux vaut garder un peu de moteur afin de réaliser une sorte d'arrondi d'un coup de gaz au dernier moment. Conclusion : une conversion trčs simple, sans se prendre la tęte, améliorable, bien sűr , mais déjŕ trčs agréable les soirées d'été sans vent...
Les passages bas sont un vrai régal :
|
||||||||
|
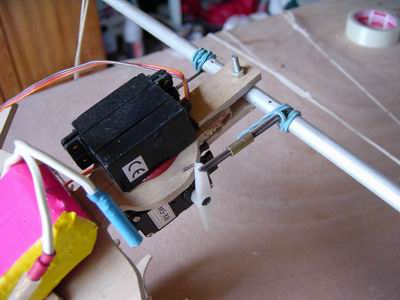
la version 1.5 du paramoteur Pour amélirer le calage de la voile, la longueure des suspentes avant et un peu modifiée. Le callage du moteur est réglé encore plus ŕ piquer
pour éviter que plein gaz, l'ensemble ne se mette ŕ plat. La derničre modifiaction concerne la commande de roulis : remplacement des 2 seros standards en parrallčle par un servos 10kg de Hitec (31700). Du coup l'amplitude de la commande est plus importante, et donc le paramoteur beaucoup plus maniable. Ainsi le vol peut se dérouler męme avec une petite brise. La maniabilité est telle qu'il peut réaliser une série de 360° verticaux.
La vidéo (5,6Mo)
|
||||||||
|
|
Texte
![]()